

Die automatisierte Durchführung einer Waldinventur
Unterstützen Sie Ihre Waldbewirtschaftung mit einer innovativen Waldinventur.
Eine Waldinventur kann ein leistungsstarkes Managementwerkzeug für die Waldbewirtschaftung sein. Dank technologischer Fortschritte ist es möglich, eine Waldinventur mithilfe von LiDAR-Scans durchzuführen und die benötigten Informationen automatisch aus Punktwolken zu extrahieren. Vor kurzem haben wir einen innovativen, universellen Ansatz entwickelt, mit dem einzelne Bäume aus verschiedenen Arten von Scans identifiziert und relevante Inventurdaten erfasst werden können. Wenn Sie wissen möchten, wie wir das gemacht haben, ist dieser Blogbeitrag genau das Richtige für Sie!
Was ist eine Waldinventur und wozu dient sie?
Ein wichtiger Bestandteil der Waldbewirtschaftung ist eine genaue Waldinventur. Eine Waldinventur ist die Erfassung von Informationen über den Zustand und die Vielfalt eines Gemeinschaftswaldes. Sie liefert Details wie den Zustand der Bäume, ihre Art, Größe und Standort.
Eine Waldinventur kann durchgeführt werden, um:
- Erkennung von Schädlingen oder Krankheiten bei Bäumen
- Unterstützung der Stadtplaner bei der Entwicklung von Instandhaltungs- und Verwaltungsplänen
- Analyse und Verbesserung der Umweltauswirkungen der Bäume im Rahmen einer nachhaltigen Waldbewirtschaftung
- Bestimmen Sie den Wert des kommunalen Baumbestandes der Gemeinde im Hinblick auf steigende Immobilienwerte.
- die Bewohner über ihren Gemeinschaftswald informieren
- visuelle Beurteilung von Holz und Ermittlung potenzieller Brandgefahren und des Brandrisikos
Verwendung von LiDAR- Erhebungen für die Waldinventur
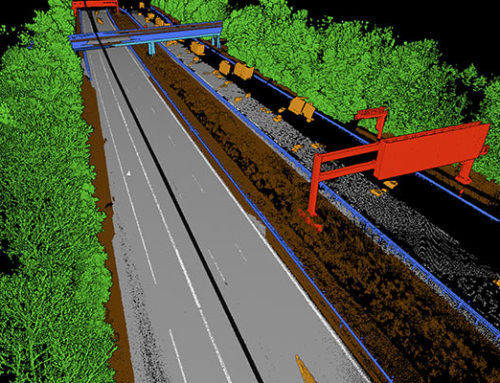
Es gibt viele Methoden, um eine Waldinventur durchzuführen. In den letzten Jahren haben sich sowohl luftgestützte als auch bodengestützte LiDAR-Vermessungen für diese Aufgabe durchgesetzt, da sie dank technologischer Fortschritte kostengünstiger und präziser geworden sind. Das liegt daran, dass immer mehr Unternehmen kostengünstigere LiDAR-Sensoren entwickeln und die Verfügbarkeit von Drohnen, die LiDAR-Daten erfassen, höher ist als je zuvor. Auch die Qualität der Scans hat sich erheblich verbessert, da die Sensoren mehr Impulse pro Quadratmeter aussenden und Daten mit extrem hoher Punktdichte erfassen können. Mit den neuesten Cloud-Lösungen und leistungsstarken Computerprozessoren können große Mengen an 3D-Daten gespeichert, verarbeitet und organisiert werden.
Dennoch ist die Erfassung von Bestandsdaten wie der Anzahl der Bäume, ihrer Kronenform oder Höhe sehr arbeitsintensiv, da dies oft manuell erfolgt. Es gibt zwar einige automatisierte Methoden und Softwarelösungen, diese sind jedoch auf sehr ausgeprägte Punktwolkenmerkmale wie sichtbare Baumstämme oder räumlich voneinander getrennte Bäume angewiesen.
Eine Waldinventur, die gemeinsam mit RAG auf neue Art und Weise durchgeführt wurde
Ziele
Ein Teil unseres neuesten Projekts für RAG bestand darin, eine Waldinventur als Proof of Concept durchzuführen. RAG ist auf die langfristige Überwachung von Bergbauschäden spezialisiert, d. h. die automatische Erkennung von Landschaftsveränderungen, insbesondere von Bodenbewegungen. Eine Waldinventur kann dabei helfen, die Ursachen für Veränderungen in der Landschaft besser zu isolieren, indem Veränderungen im Laufe der Zeit überwacht und beobachtet wird, welche davon Folgeschäden des Tagebaus sein könnten.
Das Ziel war es, eine exakte Identifizierung der Baumspitzen in der Punktwolke sowie eine individuelle Baumtrennung mit entsprechenden Bestandsdaten zu ermöglichen:
- object-ID,
- position,
- crown’s extent
as a result.

Herausforderungen
LiDAR-Punktwolken von Bäumen können je nach der verwendeten Erfassungsmethode (luftgestütztes oder terrestrisches LiDAR-Scannen) sehr unterschiedlich sein. Deshalb bestand eine der größten Herausforderungen darin, Algorithmen zu entwickeln, die so wenig wie möglich auf den spezifischen Eigenschaften der verschiedenen Scan-Typen basieren, damit sie universell eingesetzt werden können. Manchmal waren Methoden zur Erkennung von Baumstämmen und Baumkronen, die bei einer Punktwolke funktionierten, für eine andere nicht geeignet. Die Entwicklung eines universellen Ansatzes erforderte das Testen verschiedener Methoden wie Wasserscheideteilung und Regionswachstum aus erkannten Baumstämmen.
Implementierung
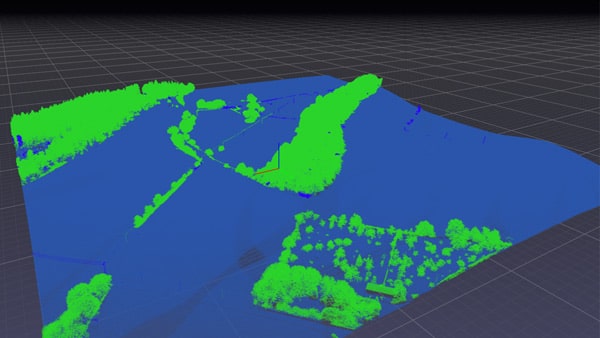
Wir haben Deep Learning und verschiedene intelligente Algorithmen kombiniert, um Baumspitzen zu identifizieren und einzelne Bäume von oben zu unterscheiden, sowohl mit sichtbaren Baumstämmen als auch ohne. Zunächst musste die Vegetation manuell klassifiziert werden, um einen umfassenden Satz von Trainingsdaten für das neuronale Netzwerk zu generieren, damit der Prozess in Zukunft automatisch durchgeführt werden kann. Mit Hilfe von Pointly und seinen benutzerfreundlichen Auswahlwerkzeugen konnte diese Aufgabe jedoch in nur wenigen Tagen erledigt werden.
Wir haben zunächst alle Bäume und anderen Objekte mit Pointly klassifiziert, um mit der Instanzsegmentierung der einzelnen Bäume fortzufahren. Die Segmentierung erfolgte mithilfe einer Kombination aus Baummerkmalen (wie Kronenmaxima), Baumstumpfpositionen und georäumlichen Algorithmen. Stumpfposition und -höhe wurden für jedes Baumsegment bestimmt, während die Kronenausdehnung mittels 2D-Projektion ermittelt wurde. Anschließend wurden die Ergebnisse (Klassifizierung und Instanzsegmentierung) in andere gängige Geodatentypen (z. B. GeoJSON, Esri-Shape-Datei) übertragen und mit zusätzlichen Informationen wie Höhenattributen angereichert.
Proof-of-Concept-Ergebnis
Der Proof of Concept im Projekt mit RAG war erfolgreich. Es wurden zwei Kartenebenen mit Baumzahlen, Kronenformen sowie Baumhöhen generiert. Aktuell werden laufend neue Daten verarbeitet, sodass dieser Service automatisiert und bald auch direkt in Pointly angeboten werden kann.
Pointly – Zeigen, was wichtig ist.
Pointly ist eine intelligente, cloudbasierte Softwarelösung zur Verwaltung und Klassifizierung von 3D-Punktwolken – schneller und präziser als je zuvor.
Pointly Services bieten bedarfsgerechte, fortschrittliche 3D-Punktwolkenlösungen, individuell zugeschnitten auf spezifische Anforderungen.


Hinterlassen Sie einen Kommentar