

The automated conduction of a forest inventory
Help your forest management thrive with an innovative forest inventory
A forest inventory can be a powerful management tool for forest management. Due to technological advances, it is possible to carry out a forest inventory using LiDAR scans and extract needed information automatically from point clouds. Recently, we developed an innovative, universal approach which enables identifying individual trees from different types of scans and gather relevant inventory data. If you want to know how we did it, this blog post is for you!
What is a forest inventory and its purpose?
An important part of forest management is an accurate forest inventory. A forest inventory is the gathering of information on the health and diversity of a community forest. It provides details such as tree condition, species, size and location.
A forest inventory may be conducted to:
- identify insect or disease problems of trees
- help the urban planners to develop maintenance and management plans
- analyze and increase the environmental impact of trees as a part of sustainable forest
management - determine the value of the community's trees with regarding increasing property values
- inform the residents about their community forest
- visually assess timber and determine potential fire hazards and the risk of fire
Using LiDAR surveys for forest inventory
There are many methods how to conduct a forest inventory. In recent years both aerial and terrestrial LiDAR surveys have become widely used for this task as technological advances make it more affordable and precise. That is because more and more companies are developing cheaper LiDAR sensors and the availability of drones collecting LiDAR data is higher than ever. There has also been a big improvement in the quality of the scans as the sensors can emit more pulses per square meter and are able to collect data with extremely high point density. With the newest cloud solutions and high-performance computer processors, large amounts of 3D data can be stored, processed and organized.
Nevertheless, extracting inventory information like number of trees, their canopy shape or height is very labor-intensive as this is often done manually. A few automated methods and software solutions exist but they rely on very pronounced point cloud features like visible tree trunk or spatially separated trees.
A forest inventory conducted in a new way together with RAG
Goals
Part of our latest project for RAG was to conduct a forest inventory as a proof of concept. RAG specializes in long-term monitoring of mining damages, i.e. automatic detection of landscape changes, and here especially ground movements. A forest inventory can help to better isolate the causes of changes in the landscape through monitoring changes over time and observing which of them may be consequential damage to opencast mining.
The goal was to provide exact tree point identification in the point cloud as well as individual tree separation with corresponding inventory data:
- object-ID,
- position,
- crown’s extent
as a result.

Challenges
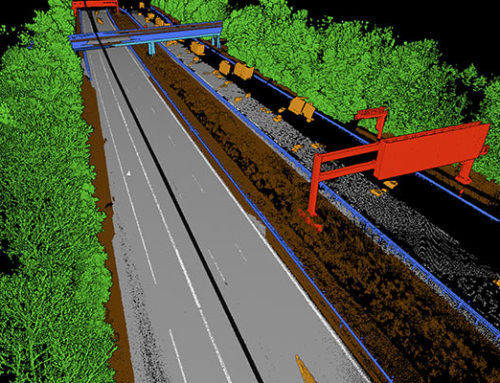
LiDAR point clouds of trees can be extremely diverse depending on the applied acquisition method (airborne or terrestrial LiDAR scanning). That is why one of the biggest challenges was to develop algorithms based as little as possible on the specific characteristics of the different scan types, so that they could be used universally. Sometimes methods of recognizing tree trunk and treetops working on one point cloud were not suitable for another. Developing a universal approach required testing different methods like watershed separation and region growing from detected tree stems.
Implementation
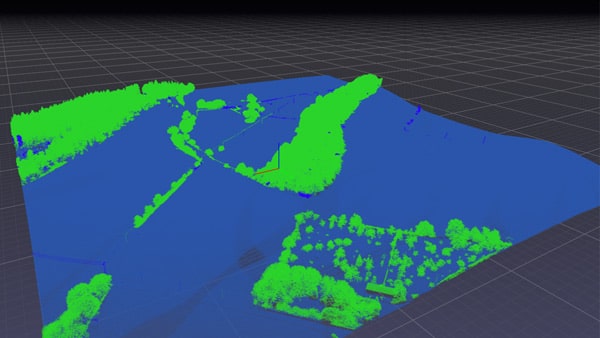
We combined deep learning and different smart algorithms to identify tree points and separate individual trees from above, both with visible tree trunks and without. Initially, the vegetation had to be classified manually to generate a comprehensive set of training data for the neural network so the process can be done automatically in the future. However, with the help of Pointly and its easy-to-use selection tools this task was performed in just a few days.
We first classified all trees and other objects with Pointly to proceed with instance segmentation of the individual trees. The segmentation was performed using a combination of tree features (such as crown maxima), tree stump positions and geospatial algorithms. Stump position and height were determined for each tree segment, whereas the crown extent was determined by means of 2D projection. Afterwards, the results (classification and instance segmentation) were transferred into other common geo data types (i.e. GeoJSON, Esri shape file), enriched with additional information such as height attributes.
Proof of concept outcome
The proof of concept in the project with RAG was successful. 2 map layers with tree counts, canopy shapes as well as tree height were generated. Now ongoing processing of new data is being performed so that this service can be automated and offered also directly in Pointly soon
Pointly – Point out what matters.
Pointly is an intelligent, cloud-based software solution to manage and classify 3D point clouds – faster and more precise than ever before.
With Pointly Services you can get on-demand advanced 3D point cloud solutions tailormade for you.


Leave A Comment