

The new way of generating BIM models from 3D point clouds
Building Information Modeling (BIM) is considered to be the future of construction – from design and analysis to documentation, maintenance and renovation. Currently, technological progress makes it possible to create very precise 3D building models including additional information like specifications, diagrams, financial considerations or even historical and real-time data such as for weather, customer demand or supply disruptions. Recently, we took a challenge and created a BIM Model from photogrammetric point clouds with added area attributes for roofs and walls. Read this blog to learn more about our approach and the results!
What’s BIM?
Building Information Modeling (BIM) is a method used for efficient planning, designing, constructing and managing buildings and infrastructure with the help of appropriate software. With BIM, all the relevant building data is gathered digitally and visualized as a „digital twin“ before being built in reality. In this way, it is possible to check if the objects meet all the expectations and easily eliminate potential design errors and inconsistencies. But that is not all – digital twins also enable you to control and maintain the building after it was built. BIM improves design decisions and building performance during the project lifecycle.
Technological advances improving BIM
Due to rising trends in digitization across industries in recent years, BIM has been gaining in popularity. The BIM market is estimated to grow from USD 4.9 billion in 2019 to USD 8.9 billion by 2024. There are many reasons for the fast development of this method. One of them is the improvement of 3D technologies used for creating the „digital twins“. In the past, the modeling was performed based on 2D methods which was time-consuming and less precise. Nowadays, it is possible to deliver high-quality 3D data for building modeling, for example by using LiDAR.
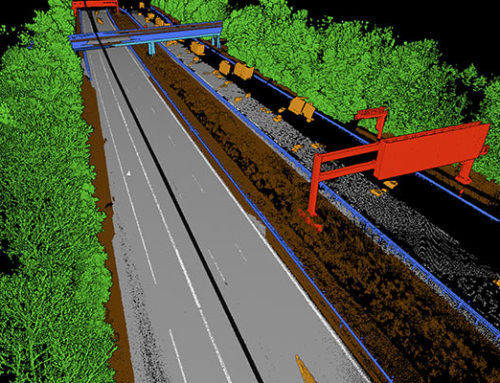
LiDAR is a remote sensing method using light in the form of a pulsed laser to measure ranges (variable distances) to the Earth. LiDAR is used to generate 3D models called point clouds which can consist of millions of data points. An important factor to notice is that the sensors do not only generate accurate data for building surfaces and more complex structures such as bridges or utilities but are also capable to precisely capture their surroundings and interior. Hence it is possible to get information about the whole building or construction, which is a key for BIM applications.
Goal
One of the latest Use Cases conducted with Pointly & Pointly Service included creating LOD 2.3 Building Models. LOD is the abbreviation for Level of Detail and is one of its most important characteristics of a 3D city model as it enables optimization of different zoom levels. LOD 2.3 is a detailed 3D modeling of roof shapes with a vertical projection to the ground but without details like skylights, chimneys, antennas or solar panels.
The project goal was to automatically generate entire city models with a high precision from aerial laser scans with additional information on the roof and wall surface. The final task was to feed the results into a 3D City Database for web visualization, mapping and planning.
Challenges
There are many different types of roofs and roofing materials. The basic shapes of roofs are flat, mono-pitched, gabled, hipped, butterfly, arched and domed but there are many variations on these. Because of that most rule-based approaches (fixed rules to define what a roof is) to identify roofs eventually fail on complex shaped roofs and could not be considered. The biggest challenge of the project was to develop one reliable approach to handle all the different roof types. Another difficulty was that walls are not always captured in aerial laser scans, which makes building modelling more challenging.
Implementation
We combined 3D Deep Learning to identify roofs in the point clouds and computer vision techniques to identify keypoints for roof parts. Keypoints are spatial locations, or points in the image that define what is interesting or what stands out – in this case the corners of the roof. In order to generate well-formed CAD Model representations, the detected roof surfaces were turned into triangle meshes.

The generated roof models were then joined with already existing 2D building footprints to generate a complete 3D building model with accurate roof overhang.

Outcome
We successfully developed an automated and scalable pipeline for generating LOD 2.3 building models from point clouds and building footprints.
The result was a CAD file with building model in LOD2 (building shape and roof shape) with added area attributes for roofs and walls. This approach can be transferred to similar scan types with comparably small effort. Just slight adaptions for the roof extraction would be needed to work on completely new city scenes.
Pointly – Point out what matters.
Pointly is an intelligent, cloud-based software solution to manage and classify 3D point clouds – faster and more precise than ever before.
With Pointly Services you can get on-demand advanced 3D point cloud solutions tailormade for you.



Leave A Comment